Neuromorphic Real-Time
Computing and Control
Compliant Motor Control
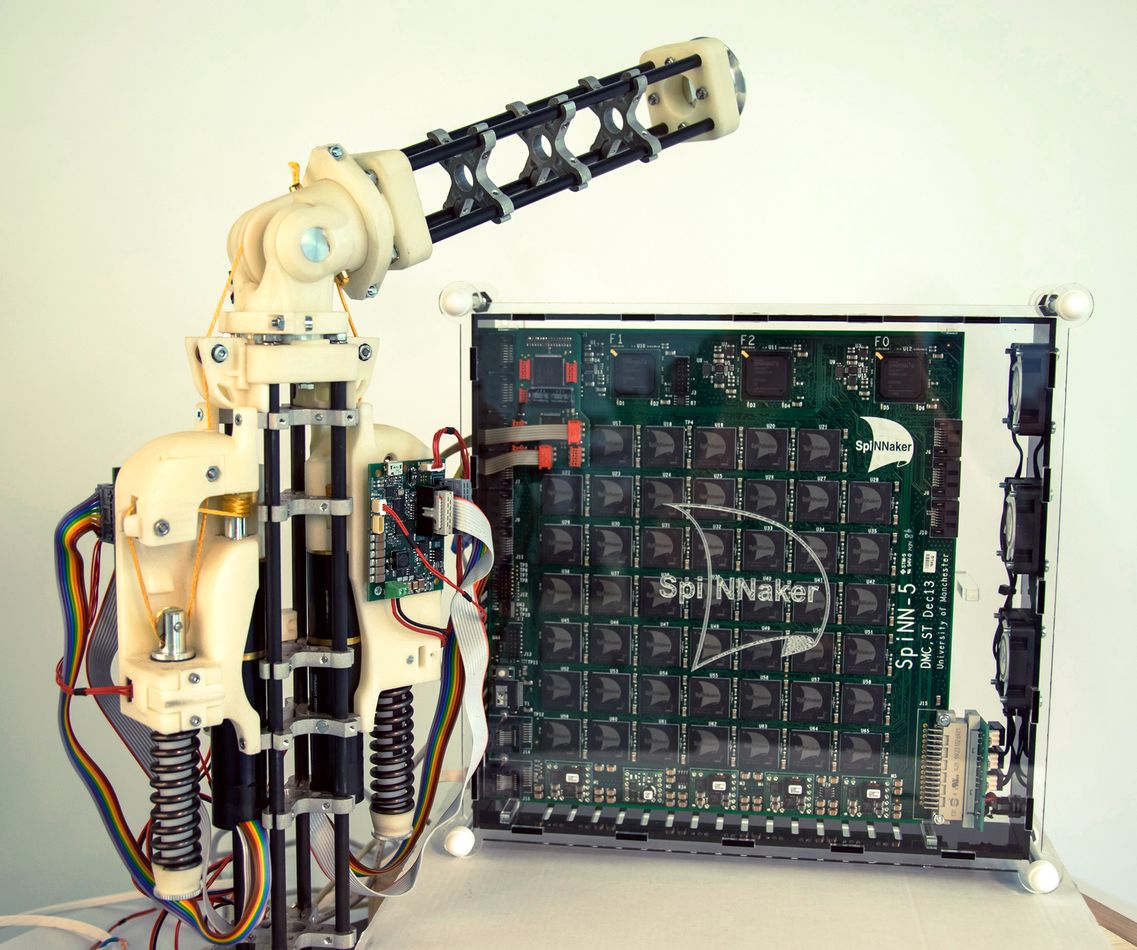
Today's robots are gaining more and more impressive capabilities. Still, the way they move or walk can easily be recognized to be non-human. Robots clearly act like robots. We want to build robots that are different, robots that are more human. Not only for aesthetic reasons (which are also of paramount importance when building next-generation limb-prostheses); but lightweight, compliant robots are a requirement for safe, productive and natural interaction between humans and robots - in industrial as well as in home settings.
One fundamental difference between present-day robots and humans lies in their different mechanics and propulsion. We are currently exploring Myorobotics[1], a robotics toolkit that replaces the stiff and heavy-weight shafts and gearboxes of traditional robots for light-weight artificial bones and muscles. Just as in a human arm, a Myorobotics joint is not flexed by a rigid gearbox, but by a pair of muscles pulling tendons. This concept enables very natural movements and allows for lightweight design. However, controlling such a system is a big challenge for conventional control theory. We apply neuro-inspired control methods [2] executed in real-time on neuromorphic hardware.
Contact: Christoph Richter
- http://www.myorobotics.eu
- Richter, C.; Jentzsch, S.; Hostettler, R.; Garrido, J.; Ros, E.; Knoll, A. C.; Röhrbein, F.; van der Smagt, P.; Conradt, J.: Musculoskeletal Robots - Scalability in Neural Control. Robotics and Automation Magazine, 2016. preprint on arXiv.org
Adaptive Sensory Motor Systems
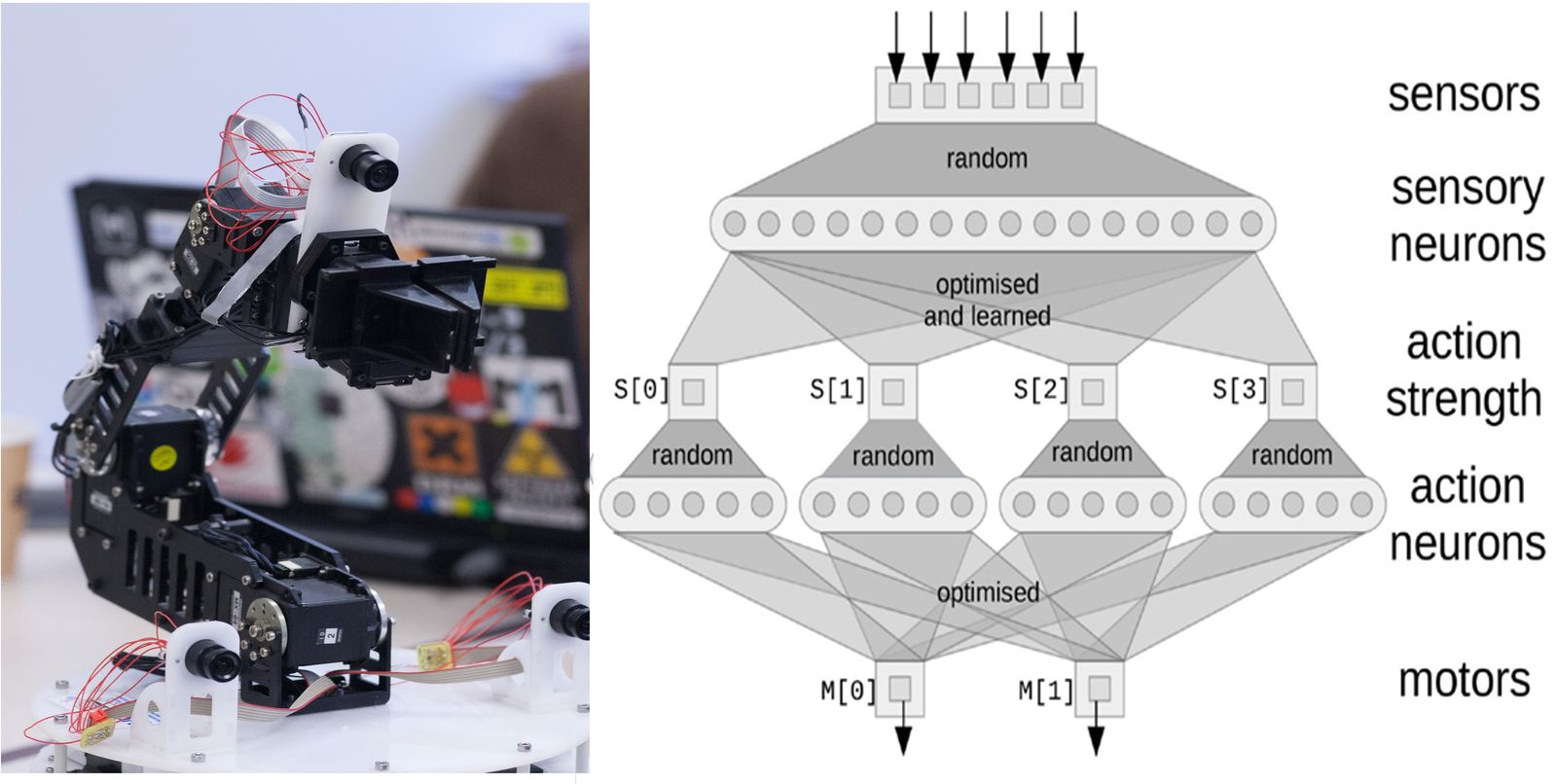
Efficient sensorimotor processing is inherently driven by physical real-world constraints that an acting agent faces in its environment. Sensory streams contain certain statistical dependencies determined by the structure of the world, which impose constraints on a system’s sensorimotor affordances [1]. This limits the number of possible sensory information patterns and plausible motor actions. Learning mechanisms allow the system to extract the underlying correlations in sensorimotor streams.
This research direction focuses on the exploration of sensorimotor learning paradigms for embedding adaptive behaviors in robotic system and demonstrate flexible control systems using neuromorphic hardware and neural-based adaptive control [2]. We employ large-scale neural networks for gathering and processing complex sensory information, learning sensorimotor contingencies, and providing adaptive responses. To investigate the properties of such systems, we develop flexible embodied robot platforms and integrate them within a rich tool suite for specifying neural algorithms that can be implemented in embedded neuromorphic hardware [3].
Contact: Jörg Conradt, Cristian Axenie
- Gibson, E. J.; Pick, A. D. An Ecological Approach to Perceptual Learning and Development, Oxford Univ. Press, 2003.
- J. Conradt, F. Galluppi, T. Stewart, Trainable sensorimotor mapping in a neuromorphic robot. Robotics and Autonomous Systems, 2014
- T. Stewart, A. Mundy, A. Kleinhans, J. Conradt, Serendipitous Offline Learning in a Neuromorphic Robot. Frontiers in Neurorobotics 10 (01), 2016
Low-Power Large Scale Neuronal Modeling in Neuroprostheses
This project investigates neuromorphic computing technology, both at the algorithmic and at the hardware level, to enhance real-time neuro-prosthetic devices. We apply spike-based information processing algorithms to interpret neuro-recorded signals (such as EEG and EMG), which allow real-time computation and therefore closed loop control based on such signals. Such spike-based neuronal processing algorithms yield significantly higher flexibility and inherent run-time adaptation, well beyond traditional hard-coded signal processing. In a parallel investigation, we explore such spiking algorithms operating on dedicated neuromorphic hardware (such as SpiNNaker or IBM’s TrueNorth), which allows low-energy real-time processing to create portable closed-loop neuroprosthetic devices. Ultimately, we envision to accelerate the next generation of intelligent neuro-prosthetic systems.
Contact: Zied Tayeb, Christoph Richter, Jörg Conradt
Automotive Environmental Modeling

From the first DARPA grand and urban challenges to recent experiments of Google, Advanced Driver Assistance Systems and autonomous driving have seen extensive research and thus made a huge jump during the last decade. However, there is still a gap between current systems and human level performance especially in challenging driving situations. In contrast to the variety of redundant sensors used in autonomous vehicle prototypes, human drivers manage to handle these situations by just using vision and cognitive abilities.
We aim to explore ways of re-modelling and improving available automotive environment modeling approaches based on multi-sensor data fusion by applying spiking neuron processing paradigms on neuromorphic hardware. Furthermore, we intend to evaluate the potential of neuromorphic hardware for automotive signal processing problems, while at the same time formulating requirements for the efficient hard- and software integration into future automotive embedded system architectures.
Contact: Florian Mirus