Self-Construction and Organization
of Neuronal Circuits
Sensory Integration
Learning processes which take place during the development of a biological nervous system enable it to extract mappings between external stimuli and its internal state. Although the neural substrate is not well understood and formalized, the learning and development component can enhance adaptation and flexibility capabilities of today's technical systems. This subsequently allows for efficient representation and fast computation for environment understanding and interaction [1].
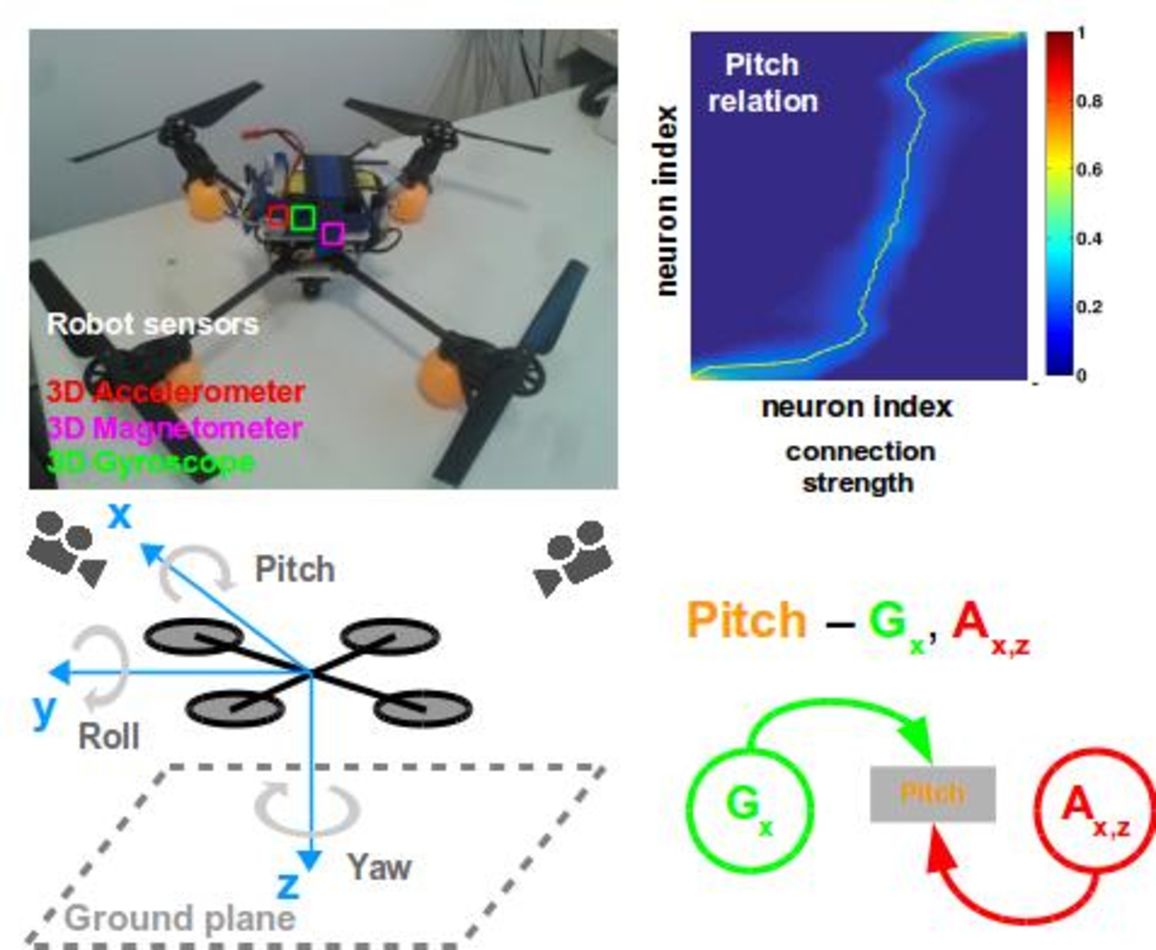
This research investigates biologically plausible learning mechanisms, for autonomous synthesis / self-construction based on available sensorimotor streams. Our framework introduces mechanisms for self-creation and learning of the functional relations between computational maps, encoding sensorimotor streams, directly from the data. Its intrinsic scalability, parallelization, and automatic adaptation to unforeseen sensory perturbations supports robust multisensory integration in robotic systems [2].
Utilizing simple and computationally effective mechanisms, our approach can be extended to learn the intrinsic correlational structure of sensory data. Moreover, by learning the sensory data statistics and distribution, the model is able to judiciously allocate resources for efficient representation and computation without any prior assumptions and simplifications [3].
Contact: Cristian Axenie
- Z. Chen, S. Haykin, J. Eggermont, S. Becker, Correlative Learning: A Basis for Brain and Adaptive Systems, Wiley, 2007.
- C. Axenie, J. Conradt, Learning Sensory Correlations for 3D Egomotion Estimation, Biomimetic and Biohybrid Systems, LNCS 9222, pp. 329-338, 2015.
- C. Axenie, C. Richter, J. Conradt, A Self-Synthesis Approach to Perceptual Learning for Multisensory Fusion in Robotics, Sensors Journal (submitted).
Grid Networks for Navigation

Modern computers usually operate with a very limited number of CPUs or GPUs. Armed with fast access to memory, they are very good at efficiently computing precisely instructed algorithms. However, they are ill suited for computations involving ambiguous data or if the algorithm needs to be updated frequently to adapt to external changes.
On the other hand, biological systems like the brain are outstandingly good in solving tasks which involve ambiguous or sparse data. For instance, navigating through a dynamically changing environment still poses a severe challenge to most SLAM (Simultaneous Localization And Mapping) systems. Contrary to computational solutions, biological systems don't display any significant problem in navigating through unstructured environments based on only sparse knowledge. E.g. it is usually no problem for healthy humans to navigate from A to B, using only coarse descriptions about the environment which may already be outdated. Furthermore, those systems are self-constructing and adapt over time, meaning that the computational algorithm needs to cope with changing hardware.
The recent discovery of grid cells in the rodent hippocampal formation may shed a light on how biology creates networks that perform spatial navigation. This may help to design technical systems that operate fully distributed with only local memory and perform similar tasks like navigation or routing [1].
Contact: Nicolai Waniek
- M. Mulas, N. Waniek, and J. Conradt, Hebbian plasticity realigns grid cell activity with external sensory cues in continuous attractor models, Frontiers in Computational Neuroscience, Vol 10, 2016.
Distributed Cognitive Navigation
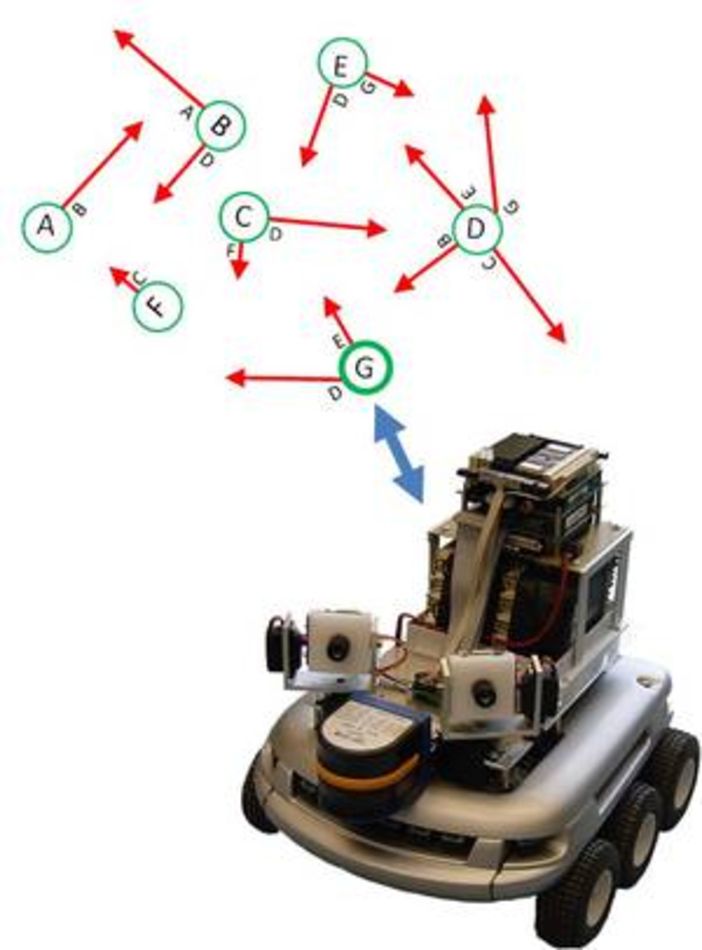
Animals quickly acquire spatial knowledge and are thereby able to navigate over very large regions. These natural methods dramatically outperform current algorithms for robotic navigation, which are either limited to small regions [1] or require huge computational resources to maintain a globally consistent spatial map [2]. We have now developed a novel system for mobile robotic navigation that like its biological counterpart decomposes explored space into a distributed graphical network of behaviorally significant places, each represented by an independent “place agent” (PA) that actively maintains the spatial and behavioral knowledge relevant for navigation in that place. Each PA operates only on its limited local information and communicates only with its directly connected graphical neighbors. Thus, there is no global supervisor and it is only necessary to maintain spatial consistency locally within the graph. This simple strategy significantly reduces computational complexity; scales well with the size of the navigable region; and permits a robot to autonomously explore, learn, and navigate large unknown office environments in real time [3].
Contact: Jörg Conradt
- Arleo, A., Spatial Learning and Navigation in Neuro-Mimetic Systems, Modeling the Rat Hippocampus. 2000, Ecole Polytechnique Federale Lausanne: Lausanne.
- Thrun, S., Robotic mapping: A survey., in Exploring Artificial Intelligence in the New Millenium, G. Lakemeyer and B. Nebel, Editors. 2002, Morgan Kaufmann.
- Conradt J. (2008) A Distributed Cognitive Map for Spatial Navigation Based on Graphically Organized Place Agents. Ph.D. Thesis, ETH Zürich.