Research Goals
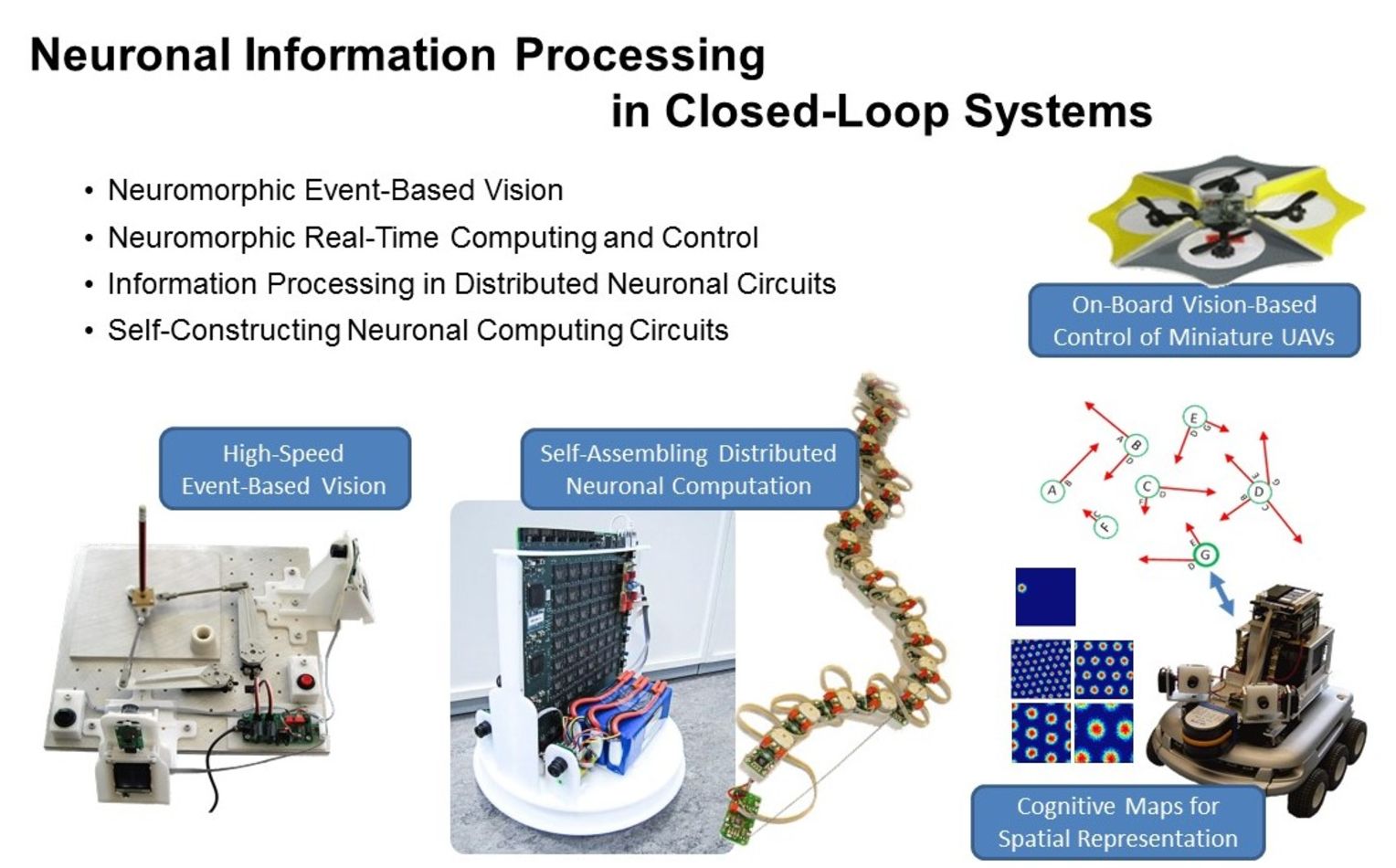
Understanding the computational principles behind how brains turn perception into behavior is one of the challenging research questions for the upcoming decades. The NST group at TUM investigates theory, models, and applied robotic implementations of distributed neuronal information processing, to (a) discover key principles by which large networks of neurons operate and (b) implement those in engineered systems to enhance their real-world performance. Current technical applications of our research are robust distributed visual information processing algorithms, efficient long range mapping and navigation for autonomous mobile robots, and massively parallel distributed low-power hardware. Undergoing scientific projects explore spiking neural networks for sensory fusion, graphical information processing for reasoning and control, and parallel distributed neural computation based on local perception, local representation and local computation, to generate globally consistent behavior.